Hotline: 0919115579
Bán hàng: Sale@thietbithuydien.net
Kỹ thuật: Support@thietbithuydien.net
Cảm biến vị trí và hành trình được sử dụng để đo đạc và xác định vị trí của các đối tượng trong hệ thống. Dưới đây là các loại cảm biến vị trí và hành trình chính:
Cảm biến tiệm cận (Proximity Sensor):
Phát hiện vị trí mà không cần tiếp xúc với vật thể.
Có thể gồm cảm biến cảm ứng (inductive), điện dung (capacitive), hoặc quang học (optical).
Thường dùng để phát hiện sự hiện diện hoặc vị trí của đối tượng ở gần.
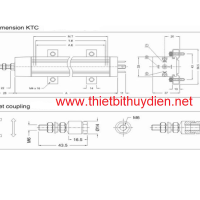
Cảm biến tuyến tính (Linear Position Sensor):
Đo hành trình hoặc vị trí di chuyển theo đường thẳng.
Bao gồm các loại như:
Cảm biến từ (Magnetostrictive Sensor): Dùng nam châm để xác định vị trí chính xác.
Cảm biến điện trở (Potentiometer): Đo vị trí thông qua thay đổi điện trở.
Cảm biến dịch chuyển LVDT (Linear Variable Differential Transformer): Sử dụng cuộn dây và lõi từ để đo hành trình chính xác.
Cảm biến quay (Rotary Position Sensor):
Đo vị trí góc quay của trục hoặc vật thể.
Gồm các loại:
Encoder: Đo vị trí góc hoặc tốc độ quay. Có hai loại chính: Incremental Encoder và Absolute Encoder.
Cảm biến quay Hall (Hall Effect Sensor): Dùng hiệu ứng Hall để đo vị trí hoặc tốc độ quay dựa trên từ trường.
Cảm biến quang (Optical Sensor):
Dùng ánh sáng để xác định vị trí hoặc hành trình.
Phổ biến trong các hệ thống tự động hóa và robot.
Cảm biến siêu âm (Ultrasonic Sensor):
Dùng sóng siêu âm để đo khoảng cách hoặc phát hiện vị trí đối tượng.
Độ chính xác cao và hoạt động tốt trong môi trường bụi hoặc ẩm.